시설원예 과채류 수확하는 작업자 행동 기술적으로 구현
[한국대학신문 임지연 기자] 전남대학교(총장 정성택)는 손형일 교수 연구팀이 인간의 수확 행동을 모방해 과채류를 수확하는 인간중심 로봇을 개발했다고 3일 밝혔다. 인간중심 로봇이란 다양한 환경에서 인간을 보조할 수 있는 로봇을 말한다.
연구팀은 토마토, 오이 등의 시설원예 과채류를 수확하는 작업자의 여러 행동을 기술적으로 구현해 인간중심 과채류 수확용 로봇 개발에 성공했다.
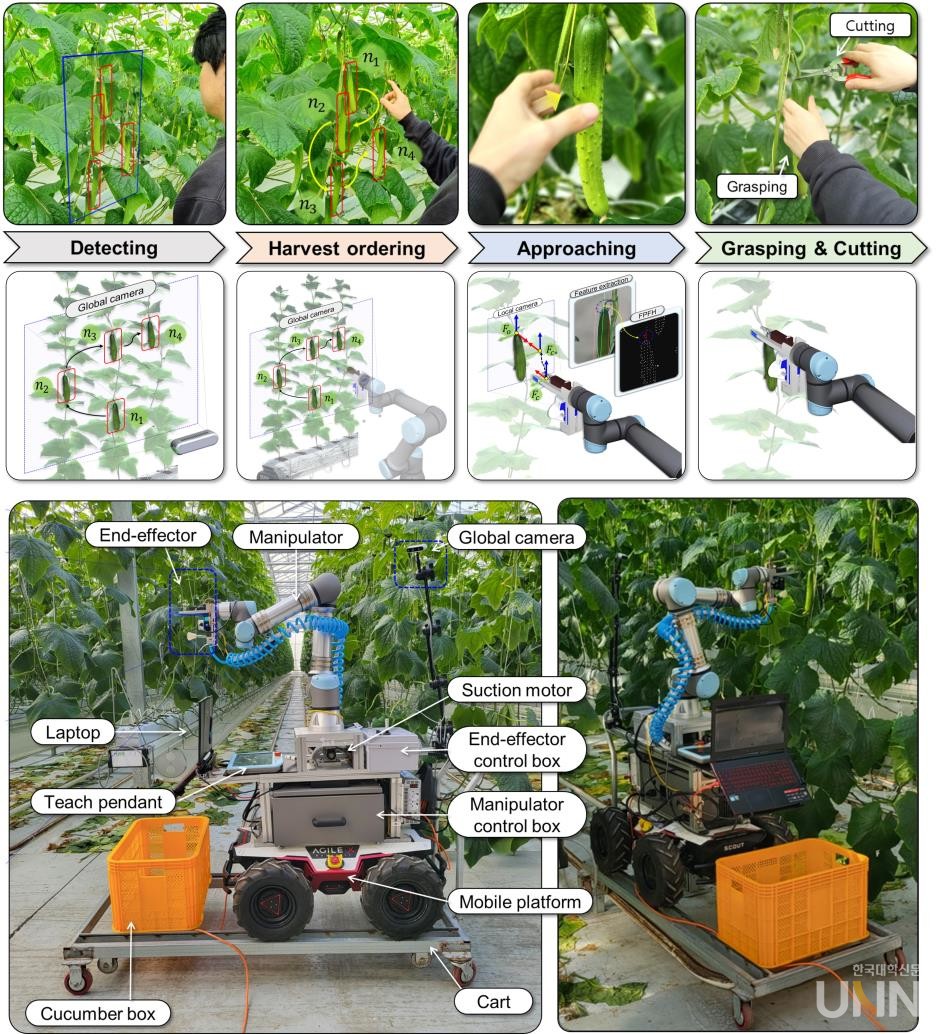
연구팀이 개발한 과채류 수확용 로봇은 인간 작업자가 수확할 때 보이는 행동들을 차례로 인식(perception), 수확 순서 최적화(harvesting ordering), 영상 기반 추적제어(visual servoing), 그리퍼(gripper)로 치환해 작물수확을 보조한다.
연구팀은 이 로봇의 ‘인식’ 부분을 광량 등 주변 환경 변화에 크게 영향을 받지 않도록 RGB-D 카메라 기반 딥러닝으로 구현했다. ‘수확 순서 최적화’ 부분은 인식 결과를 전달받아 유전자 알고리즘을 기반으로 3차원 수확 경로로 최적화하도록 했다.
또한 수확 대상 작물이 여러 요인으로 흔들리더라도 영상 안정화 알고리즘과 작물 꼭지의 여섯 가지 동작요소 벡터 추출 알고리즘을 적용해 실시간 추적제어를 수행하도록 했으며, 파지 모듈과 절단 모듈로 구성된 소프트 로봇기반 그리퍼로 수확 작물을 파지하고 절단한 후 다음 수확 순서의 작물에 대해서도 동일한 과정을 수행하도록 했다.
이 연구는 다수의 토마토와 오이를 재배하는 스마트 팜에서 현장 실증한 결과, 매우 높은 수확 성공률을 보였다. 연구팀은 수확 속도, 수확 성공률 등을 향상하기 위해 인간 작업자처럼 양팔을 사용하는 수확 로봇에 관한 후속 연구를 수행하고 있다.
이 연구는 융합바이오시스템기계공학과 손형일 교수를 비롯해 박용현 박사과정생, 설재휘 박사과정생, 박정현 석사과정생, 조유성 석사과정생, 김창조 학석사연계과정생이 참여했다.
연구 성과는 융복합 농업분야 최고 권위 국제학술지 ‘Computers and Electronics in Agriculture’(JCR 상위 0.9%, IF 8.3)와 ‘Precision Agriculture’(JCR 상위 7.8%, IF 6.2)에 각각 게재됐다. 이번 연구는 스마트팜 다부처 패키지혁신기술개발사업, BK21 4단계 IT-Bio융합시스템농업교육연구단 등의 지원으로 수행됐다.